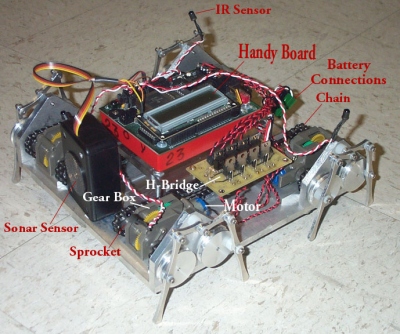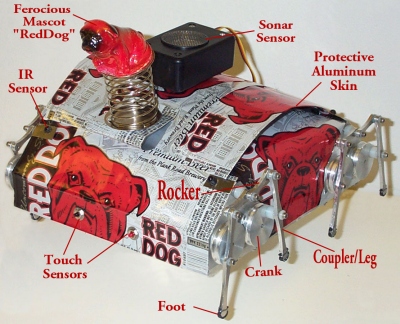
Sumatori Red Dog is the creation of Jason Booth, Ben Hawkins, Eric
Landis, Rob Preator, and Trent Wall. The Red Dog uses IR sensors
to determine its location, a sonar sensor for determining if they are below
the light, touch sensors for sensing contact with an adversary and eight
crank follower mechanisms for pushing their adversary out of the ring.
Chain drives, shown below, are used to assure proper timing of the legs.