Moriah Henning (ME B.S.’19) is one of six U students selected as a 2018 Chevron Foundation UROP Scholar, for her project entitled, “Developing 3D Printed Prosthetic Hand for Brain-Computer Interface Control.” She is a member of the Laboratory of Ergonomics & Safety, advised by faculty mentor, mechanical engineering assistant professor Andrew Merryweather. Through this UROP program, the Chevron Foundation recognizes outstanding female undergraduate researchers in STEM who contribute to the achievement of a more technically proficient global workforce.
There’s a twist in Henning’s story as she came to Utah from Iowa to double major in mechanical engineering and ballet. Henning said, “I have been dancing since I was about five. Choosing to double major was because I knew I wanted to study engineering, but I love ballet, performing, and the arts, and I did not want to stop doing those things when I came to college. While I do not have any specific plans for ballet after graduation, I hope to remain involved with the dance community by sharing my passion with people outside of that community, especially in STEM related fields.”
Ever since high school she has been interested in math and problem solving. Henning reflects, “Event though I knew when coming to the U that I wanted to study engineering I didn’t decide on mechanical engineering until the end of my freshman year. A degree in mechanical engineering opens the door to a variety of types of jobs. Of special interest to me is a career in the area of sustainable and energy engineering.”
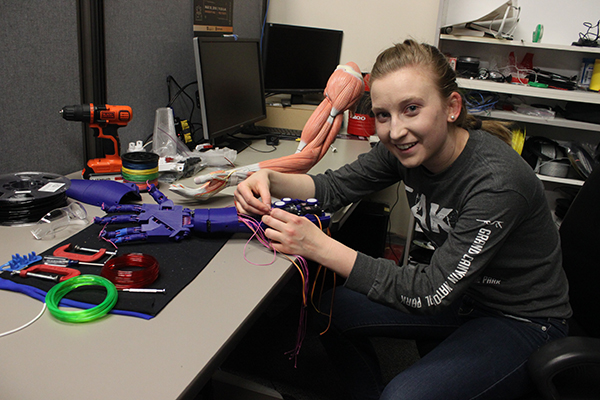
Today Henning’s research is focused on how to improve the grasping ability of an open-source robotic hand in order to complete basic activities of daily living, such as picking up a glass of water or an eating utensil. The hand is to be controlled by a brain-computer interface (BCI). Specifically, she is working with the open-source 3D-printed hand of the InMoov robot. She characterizes the InMoov hand by modeling the position of the fingers and theoretical forces involved in grasping an object.
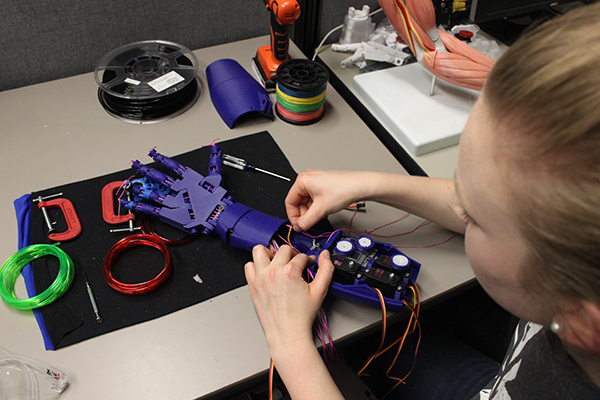 Henning explains, “I am currently building the hand and forearm as a prototype to test its actual grasping capabilities. I plan to then add grip pads, adjust range of motion and finger design to idealize the hand’s grasp. Eventually, my research is intended to provide an open-source hand compatible with a BCI to give individuals without movement in their upper extremities the ability to complete simple actions of daily living.”
Henning explains, “I am currently building the hand and forearm as a prototype to test its actual grasping capabilities. I plan to then add grip pads, adjust range of motion and finger design to idealize the hand’s grasp. Eventually, my research is intended to provide an open-source hand compatible with a BCI to give individuals without movement in their upper extremities the ability to complete simple actions of daily living.”
Along with her advisor, Henning has been invited to the U Undergraduate Research Awards Luncheon planned for early April. To learn more about Henning and her research visit the Laboratory of Ergonomics & Safety.
Ballet Photo Credit: CPRowePhotography