Design Day - Fall 2015
Design Day is an opportunity to share our Senior Design Showcase with the public. Seniors work in groups with faculty to design and test projects.
Additionally, freshman and junior mechatronics’ students compete and showcase their skills.
Senior Design Projects
 The automated clay pigeon thrower uses a unique design which rapidly throws clay pigeons at varying speeds in a 180 degree directional range. The center-feeding, constant rotational throwing channel allows the throw direction to simply be a factor of release timing, and the exit speed to be a factor of rotational speed. These factors provide a highly dynamic system which is inexpensive to produce and challenges the shooter at all times. (Automated Pigeon Thrower Poster)
The automated clay pigeon thrower uses a unique design which rapidly throws clay pigeons at varying speeds in a 180 degree directional range. The center-feeding, constant rotational throwing channel allows the throw direction to simply be a factor of release timing, and the exit speed to be a factor of rotational speed. These factors provide a highly dynamic system which is inexpensive to produce and challenges the shooter at all times. (Automated Pigeon Thrower Poster)
Team: Koffi Danhounsrou, Steve Long, Derek Lowe (lead), James Pedersen
Advisor: Dr. Kam Leang
 Travel canes are often a method of choice for the blind. While there are advanced options such as ultrasonic sensors in some “smart canes,” these are often costly (upwards of 600 dollars). The objective of the Bat Cane team will be to utilize ultrasonic sensors, an Inertial Measurement Unit (IMU), and haptic feedback to provide straight-path deviation alerts and inform the user of upcoming obstacles. These will be implemented in a cost-effective manner that will provide reliable, useful information to the blind. (Bat Cane Poster)
Travel canes are often a method of choice for the blind. While there are advanced options such as ultrasonic sensors in some “smart canes,” these are often costly (upwards of 600 dollars). The objective of the Bat Cane team will be to utilize ultrasonic sensors, an Inertial Measurement Unit (IMU), and haptic feedback to provide straight-path deviation alerts and inform the user of upcoming obstacles. These will be implemented in a cost-effective manner that will provide reliable, useful information to the blind. (Bat Cane Poster)
Team: Kim HongHyun, Raman Nageshwaran, Andria Thatcher, Jeff Wiest (lead)
Advisor: Dr. Mark Fehlberg
 The Football Tracking System is a solution to current issues in the game of American football. It is able to track the position of the football to validate if the play resulted in a touchdown, first down, fumble, etc. Programming GPS and an Inertial Measurement Unit through Arduino is the core of the effectiveness of the project. The team has gone through an iterative process to find solutions to track accurately, efficiently, and to not change the physical properties of the football. (Football Tracking System Poster)
The Football Tracking System is a solution to current issues in the game of American football. It is able to track the position of the football to validate if the play resulted in a touchdown, first down, fumble, etc. Programming GPS and an Inertial Measurement Unit through Arduino is the core of the effectiveness of the project. The team has gone through an iterative process to find solutions to track accurately, efficiently, and to not change the physical properties of the football. (Football Tracking System Poster)
Team: Sophia Lei (lead), Scott Malloy, Mark Miller, Guo Qi
Advisor: Dr. Charles Atwood
 Packrafting has emerged as a means of combining backpacking and river rafting. Today’s packrafts are small, ultralight inflatable boats that can be carried in a backpack to reach the river, assembled, and used to travel downstream. Modern packrafts are commercially available and weigh as little as five pounds.
Packrafting has emerged as a means of combining backpacking and river rafting. Today’s packrafts are small, ultralight inflatable boats that can be carried in a backpack to reach the river, assembled, and used to travel downstream. Modern packrafts are commercially available and weigh as little as five pounds.
This project focuses on the development of a hybrid, ultralight pack-cat/backpack system. The pack-cat is a one-person inflatable cataraft that uses two linear tubes and a central frame. Although pack-cats currently exist, they weigh 25-30 pounds and thus are not suitable for longer backpacking trips. One way of reducing weight is by incorporating ultralight fabrics in the inflatable, as in modern packrafts. However, another approach is to combine the function of the pack cat frame with the external frame of a backpack and possibly backpacking hiking/trekking poles to obtain a dual-use frame system that further reduces weight. (Grand Canyon Ultralight BackCat Poster)
Team: James Harris, Derek Lund, Collin Perschon (lead), Taylor Skelley
Advisor: Dr. Dan Adams
 Eighteen percent of the world’s population lives without access to electricity. Many of these individuals live in remote or underdeveloped areas which are poorly suited to centralized power generation. Access to flowing water opens up the possibility of generating hydroelectric power, but the high initial investment and infrastructure requirements of traditional hydroelectric installations make them nearly as impractical as coal or natural gas power plants. These populations have a clear need for a low-cost hydroelectric generator in a simple and user friendly package. The PowerPail is a low maintenance, portable, and rugged power generation system that is easy to deploy and operate and requires no permanent infrastructure. PowerPail improves the lives of its users by taking advantage of the always-on nature of hydro power to provide readily available power for needs such as lighting, water purification, and charging electronic devices. (PowerPail Poster)
Eighteen percent of the world’s population lives without access to electricity. Many of these individuals live in remote or underdeveloped areas which are poorly suited to centralized power generation. Access to flowing water opens up the possibility of generating hydroelectric power, but the high initial investment and infrastructure requirements of traditional hydroelectric installations make them nearly as impractical as coal or natural gas power plants. These populations have a clear need for a low-cost hydroelectric generator in a simple and user friendly package. The PowerPail is a low maintenance, portable, and rugged power generation system that is easy to deploy and operate and requires no permanent infrastructure. PowerPail improves the lives of its users by taking advantage of the always-on nature of hydro power to provide readily available power for needs such as lighting, water purification, and charging electronic devices. (PowerPail Poster)
Team: Trevor Doney, Tyler Hogenson, Virginia Llewellyn, Dean Simmonds, Aaron Werneehl (lead)
Advisor: Dr. Meredith Metzger
The project is to design a human-machine system that calculates where a person is holding a weight during a lift. A display is shown to the user informing them of a safe operating zone for the load and gives feedback if the user is lifting unsafely. Two force plates are used to determine the weight and the distance of the weight from the body. The data from the force plates is read into a computer program which provides real time feedback to the user. (Predicting Safe Lifting Postures Poster)
Team: Kelton Gubler, Robert Nelson (lead), Tyler Trogdon, Rachel Ware
Advisor: Dr. Mark Fehlberg
 In the current hospital setting, supplemental oxygen is delivered to patients at risk for depressed breathing at a constant flow rate. This constant flowing oxygen dilutes the patient’s expired gas, which is used to monitor the patient, and thus monitors may not be able to notify the nurse or doctor that the patient is no longer breathing. An episode of depressed breathing may cause brain damage or even result in death. These injuries and deaths can be prevented if depressed breathing is detected early and the patient is prompted to breathe; unfortunately, due to the previously mentioned deficiencies in the existing system, healthcare professionals’ abilities to monitor patients are not sensitive enough.
In the current hospital setting, supplemental oxygen is delivered to patients at risk for depressed breathing at a constant flow rate. This constant flowing oxygen dilutes the patient’s expired gas, which is used to monitor the patient, and thus monitors may not be able to notify the nurse or doctor that the patient is no longer breathing. An episode of depressed breathing may cause brain damage or even result in death. These injuries and deaths can be prevented if depressed breathing is detected early and the patient is prompted to breathe; unfortunately, due to the previously mentioned deficiencies in the existing system, healthcare professionals’ abilities to monitor patients are not sensitive enough.
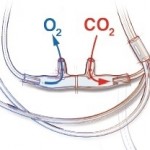
The smart oxygen delivery system intermittently delivers oxygen as well as provides a constant stream of pressure profile data from within the cannula, which improves patient monitoring. The system delivers oxygen to the patient in accordance with their natural breathing pattern rather than the constant flow method current devices use. As the patient inhales, the system detects a negative air pressure in the cannula and delivers oxygen to the patient. When the patient exhales the system detects positive pressure and shuts off the oxygen delivery. The smart oxygen delivery device may also improve patient monitoring by allowing sensors to sample non-diluted expired gas. This method may also increase oxygen savings since gas flow is shut off during patient expiration. The system will also be able to detect if the nasal cannula is inadvertently removed from the patient’s nostrils. We believe by delivering oxygen only when the patient inhales that the patient will have a more natural breathing experience, the oxygen levels of the patient will be better monitored, patient injury and death related to oxygen saturation will be reduced, there will be a savings in supplied oxygen, and fire hazards related to supplied oxygen will be reduced. (Smart Oxygen Delivery System Poster)
Team: Kyle Burk (lead), Kimberly Neff, Melynda Schreiber, Krystopher Tung
Advisors: Drs. Mark Fehlberg, Joseph Orr
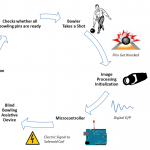 Blind bowling assistive device is the next step towards a more independent bowling experience for visually impaired. The objective of the project is to provide a tactile feedback of number of pins left after each try and also the pin which gets hit first by the ball.
Blind bowling assistive device is the next step towards a more independent bowling experience for visually impaired. The objective of the project is to provide a tactile feedback of number of pins left after each try and also the pin which gets hit first by the ball.
The system will use real time images of ten-pin array which will be processed and the information obtained will be sent forward to actuate solenoids of the assistive device to be sensed by the bowler. The ultimate purpose of the device is to enhance the experience of bowling for visually impaired. (Ten-Pin Bowling Assistive Device for Visually Impaired Poster)
Team: Mohit Binaykiya, Amol Deshmukh, Prayakta Sontakke
Advisor: Dr. Mark Fehlberg



 ME EN 3210 Mechatronics II: Mechanical Components and Control Systems Competition: The Great Escape
ME EN 3210 Mechatronics II: Mechanical Components and Control Systems Competition: The Great Escape
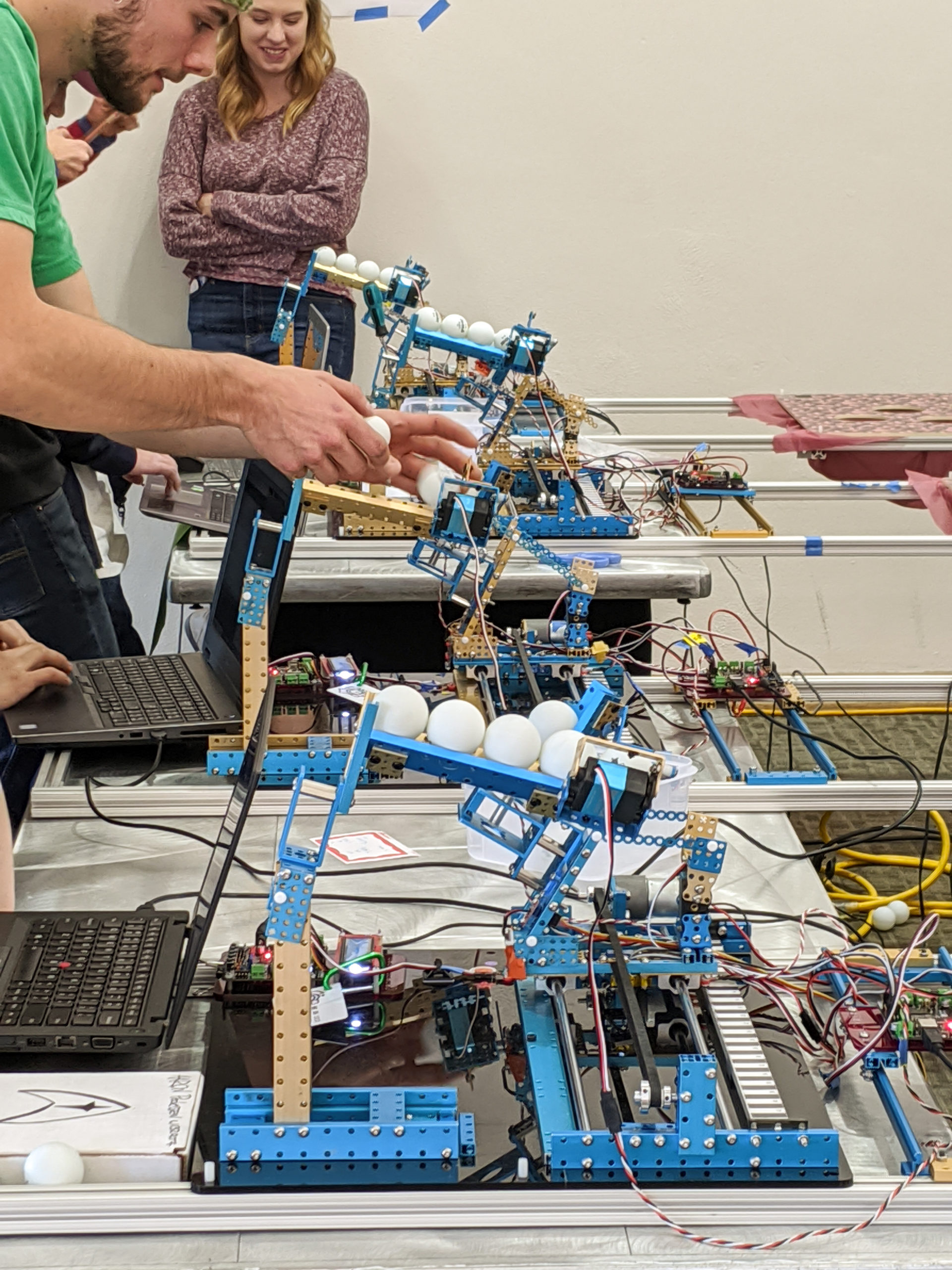
In this semester’s junior-year Mechatronics competition, 16 teams of 3-4 students will race custom-designed and fabricated autonomous climbing robots. Their task is straightforward: climb to the top of a chain-link fence as quickly as possible without falling off. There will be two climbing events: Vertical Climb, in which the chain-link fence is in a standard vertical orientation; and Hill Climb, in which the chain-link fence is titled at a 45-degree angle. Robots must be designed to compete in both events, but may be optimized to specialize in one particular event. In each event, each team gets three runs, and only their fastest run counts. The competition will begin with the Hill Climb event, and then move on to the more challenging Vertical Climb. Like in rock climbing, a safety rope will be used to guarantee a minimal level of safety, so that the teams can push the robots to their limits.
Come join us to see which robot design comes out on top!
ME EN 1000 Introduction to Mechanical Design for Engineering Systems Design Competition: Up-Cycle
In this competition, ME EN 1000 teams create models for mechanical systems to solve problems ‘off the grid.’ The Up-Cycle design competition involves prototyping one of the following systems designed to be powered using only a bicycle:
- Competition #1 – Cycle Powered Grain Mill
- Competition #2 – Cycle Powered Water Pump
- Competition #3 – Cycle Powered Washing Machine – Spin Cycle
Each team is provided with a MakeBlock starter kit and a budget for parts from a local hardware store. Teams design and build their systems using SolidWorks, hand tools and the help of 3-D printers to create custom designed parts. Teams will contend by grinding grains, pumping water, or washing clothes. Teams are required to integrate practical course concepts into their designs. Teams with the most creative designs that output the largest volumes win. Winning in this case most definitely results from strong engineering skills and extensive ‘Evopteration.’
ME EN 1010 Computer-Based Problem Solving for Engineering Systems Competition: Battleship
Teams have been assembled in the Pacific Ocean to demonstrate their programming skills and compete for elite status. Each team will control an identical “ping-pong” missile launcher, which must be programmed to hit six randomly located battleships. Teams must first use MATLAB programming to correctly identify the coordinates of the battleships in a provided satellite image and transmit them to the microcontrollers on-board their launchers. Their launchers must be programmed to autonomously aim, shoot, and reload. Points will be awarded for identifying and hitting each battleship, with time acting as a tie-breaker.