Design Day - Fall 2017
Design Day is an opportunity to share our Senior Design Showcase with the public. Seniors work in groups with faculty to design and test projects.
Additionally, freshman and junior mechatronics’ students compete and showcase their skills.
Senior Design Projects
 Utah TRAILS (Therapeutic Rehabilitation And Independent Life Styles), helps people with spinal cord injuries participate in water activities. To reduce discomfort for patients, a Portable Accessible Docking System (PADS) is used to load them, which is also quicker and requires less assistance.
Utah TRAILS (Therapeutic Rehabilitation And Independent Life Styles), helps people with spinal cord injuries participate in water activities. To reduce discomfort for patients, a Portable Accessible Docking System (PADS) is used to load them, which is also quicker and requires less assistance.
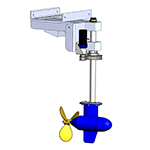
Existing PADS do not have a proposition or navigation system. Our objective is to design, test, and implement a controlled PADS propulsion system. This propulsion system must use only electric motors and be integrated onto the existing PADS.
Users are people who have limited to no hand movement. Control of the system is achieved by using a joystick and/or a sip-n-puff action. The overall system will be able to control the boat and propel it in any direction during piloting, docking, and trailering. (Advanced Navigation Control for a PADS Poster)
Team: Zandon Midson, Benjamin Rosser, Aaron Sonderegger (lead)
Advisor: Assist. Prof. Andrew Merryweather
 Compost produces heat naturally when decomposing. This heat is difficult to capture without a proper system. The goal of this project is to create a mechanism that captures heat from compost and creates finished compost in a user friendly manner. (Compost Heat Capture Poster)
Compost produces heat naturally when decomposing. This heat is difficult to capture without a proper system. The goal of this project is to create a mechanism that captures heat from compost and creates finished compost in a user friendly manner. (Compost Heat Capture Poster)
Team: Sean Lund (lead), Santiago Salcedo Marban, Steiner Paulsen, Shang-Yen Yang
Advisor: Assist. Prof. Marc Calaf
 Our team’s hypothesis is that by allowing a child to ride a tricycle that requires them to steer in the opposite direction than they would like to turn, it will subconsciously teach them to counter-steer. Counter steering during early development will help children learn to properly turn any single-track vehicle, such as a bicycle.
Our team’s hypothesis is that by allowing a child to ride a tricycle that requires them to steer in the opposite direction than they would like to turn, it will subconsciously teach them to counter-steer. Counter steering during early development will help children learn to properly turn any single-track vehicle, such as a bicycle.
The conflict going from a tricycle to learning to ride a bike arises from the fact that a single-track vehicle must account for possible changes in equilibrium to ensure stability. Counter steering is a control method in which, initiating a turn requires steering in the opposite direction. This method is widely used (often subconsciously) by skilled riders, but misunderstood even by experienced riders.
With this hypothesis in mind, Prof. Rebecca Brannon has proposed a tricycle device, between the handlebars and the front wheel, that reverses the steering direction. Using a system of two gears interlocked at a one to one ratio our team designed and manufactured a retrofit kit that accomplishes reversed steering and that can be attached to a standard children’s tricycle. (Counter Steering Tricycle Poster)
Team: Stefan Dancy (lead), Ryan McGuire, Jeff Williams
Advisor: Assoc. Prof. Rebecca Brannon
![]() Quadriplegic patients currently use a manually adjustable arm mounted Tobii screen to communicate with family and caretakers. Patients sometimes involuntarily move out of position or are moved by caretakers in ways that remove the patient from the operating range of the eye tracking sensor on the Tobii screen.
Quadriplegic patients currently use a manually adjustable arm mounted Tobii screen to communicate with family and caretakers. Patients sometimes involuntarily move out of position or are moved by caretakers in ways that remove the patient from the operating range of the eye tracking sensor on the Tobii screen.
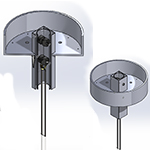
The objective of our project is aimed at building an automated arm that interfaces with face tracking software. Our arm will increase the usability of the Tobii screen by maintaining the ideal orientation between the Tobii’s eye tracking sensor and the patients face. Along with the automated mode, our system will be controllable by the patient through a sip puff/joystick device. This mode will enable the patient to move the screen away when they become fatigued and bring it back when they are ready to resume its use. (Face Tracking Robotic Adaptive Screen Mount Poster)
Team: Hunter Brown, Ethan Clark, Daniel Gomm (lead), Kenton Young
Advisor: Assist. Prof. Andrew Merryweather
 The one overarching goal zoos have for their animals is to provide each species with a natural and engaging environment. One way that zoos accomplish this is by using enrichment devices. An enrichment device is any item that stimulates an animal’s senses. Enrichment devices enable animals to display instinctive behaviors observed in the wild thus improving their quality of life. In general, zoos are limited to simple plastic objects, which do not fully engage the animals’ senses and intellect.
The one overarching goal zoos have for their animals is to provide each species with a natural and engaging environment. One way that zoos accomplish this is by using enrichment devices. An enrichment device is any item that stimulates an animal’s senses. Enrichment devices enable animals to display instinctive behaviors observed in the wild thus improving their quality of life. In general, zoos are limited to simple plastic objects, which do not fully engage the animals’ senses and intellect.
To change this, the Utah Hogle Zoo launched a collaborative effort with the University of Utah to create an advanced enrichment device for their polar bears, grizzly bears, and pinnipeds. These species have developed unnatural anticipatory pacing. Our team’s project, the Weeble Wobble, is designed to disrupt these behaviors by wobbling to attract their attention. Similar to prey in the wild, this device moves unpredictably. Using an internal mechatronic device, the wobbling will be randomized periodically throughout the day. (Hogle Zoo Bear Poster)
Team: Garrett Alldredge, Dallan Barnes, Colton Eyres (lead), William Powell
Advisor: Assoc. Prof. Bart Raeymaekers
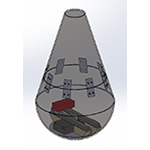
 The Hogle Zoo has tasked the University of Utah’s mechanical engineering students with conceptualizing, designing, and implementing an enrichment device for the elephants. The device, or Hanging Dispenser hopes to increase the elephant’s feeding time, promote both exercise and playtime, while increasing social interaction. The Hanging Dispenser is designed to be hung just within of reach of the elephants, containing a portion of their daily produce. As the elephants interact with the device by either the attachment rope or nudging the device itself, food will dispense from the four feeding holes in the hopper. Social interaction is induced due to the size difference of the elephants, requiring the older and taller elephant to engage the device to dispense food for the younger, smaller elephant. (Hogle Zoo Elephant Poster)
The Hogle Zoo has tasked the University of Utah’s mechanical engineering students with conceptualizing, designing, and implementing an enrichment device for the elephants. The device, or Hanging Dispenser hopes to increase the elephant’s feeding time, promote both exercise and playtime, while increasing social interaction. The Hanging Dispenser is designed to be hung just within of reach of the elephants, containing a portion of their daily produce. As the elephants interact with the device by either the attachment rope or nudging the device itself, food will dispense from the four feeding holes in the hopper. Social interaction is induced due to the size difference of the elephants, requiring the older and taller elephant to engage the device to dispense food for the younger, smaller elephant. (Hogle Zoo Elephant Poster)
Team: Alec Sepulveda, Steven Shields, John Tran (lead)
Advisor: Assist. Prof. Wenda Tan
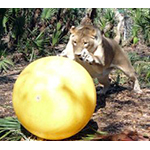 Zoos around the world typically use a 20″ Jungle Ball to enrich large cats lives in captivity. The Jungle Ball is a product from Boomer Ball, which is made of non-toxic high-density polyethylene. Our team was tasked with providing additional enrichment by making this ball move. We motorized the ball with a robot sealed inside and in which is operated remotely via Bluetooth. (Hogle Zoo Lion Poster)
Zoos around the world typically use a 20″ Jungle Ball to enrich large cats lives in captivity. The Jungle Ball is a product from Boomer Ball, which is made of non-toxic high-density polyethylene. Our team was tasked with providing additional enrichment by making this ball move. We motorized the ball with a robot sealed inside and in which is operated remotely via Bluetooth. (Hogle Zoo Lion Poster)
Team: Cameron Coombs, Anthony Fairhurst (lead), Nate Smith
Advisor: Assist. Prof. Jiyoung Chang
 Serving as an anchor between life and death, the ice screw is the most critical piece of equipment in the sport of ice climbing. Ice climber enthusiasts would like to increase their ice screw set times, and durability. After completing an engineering analysis, we focused our efforts on a re-design of the teeth. The teeth are crucial in improving the initial set-in stage and overall durability. We have further investigated the thread count and pitch of the threads to improve the overall ice screw set time. (Ice Screw Improvements Poster)
Serving as an anchor between life and death, the ice screw is the most critical piece of equipment in the sport of ice climbing. Ice climber enthusiasts would like to increase their ice screw set times, and durability. After completing an engineering analysis, we focused our efforts on a re-design of the teeth. The teeth are crucial in improving the initial set-in stage and overall durability. We have further investigated the thread count and pitch of the threads to improve the overall ice screw set time. (Ice Screw Improvements Poster)
Team: Ski Higgs, Bret Madsen (lead), Ryan Shilton, Nathan Swena
Advisor: Assist. Prof. Owen Kingstedt
 In order to facilitate the next generation of scholastic understanding, our faculty advisor Dr. Steven Naleway, would like to conduct research on live oceanic plant life here at the University of Utah. Considering that Utah is a landlocked state, a sea table is necessary to sustain and grow the desired plant life. Our sea table, much like an automated saltwater aquarium, measures and adjusts critical environmental parameters (such as temperature, pH, and salinity) in a mobile and compact design. Initially, this product will be used to specifically study kelp from the oceans of the Pacific Northwest, but is versatile enough to adjust to different oceans to cater to a vast array of research. (Landlocked Sea Table Poster)
In order to facilitate the next generation of scholastic understanding, our faculty advisor Dr. Steven Naleway, would like to conduct research on live oceanic plant life here at the University of Utah. Considering that Utah is a landlocked state, a sea table is necessary to sustain and grow the desired plant life. Our sea table, much like an automated saltwater aquarium, measures and adjusts critical environmental parameters (such as temperature, pH, and salinity) in a mobile and compact design. Initially, this product will be used to specifically study kelp from the oceans of the Pacific Northwest, but is versatile enough to adjust to different oceans to cater to a vast array of research. (Landlocked Sea Table Poster)
Team: Aaron Kehl (lead), Jaren McCourt, Cody Savage, Zachary West
Advisor: Assist. Prof. Steven Naleway
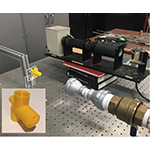 While rocket development is an important part of terrestrial and extraterrestrial exploration and research, full size rockets are often encumbering large and expensive. One workaround is the miniature supersonic flow device. It is a means of replicating and measuring the thrust of a rocket nozzle at a fraction of the size and cost, while retaining the ability to visualize converging supersonic flow.
While rocket development is an important part of terrestrial and extraterrestrial exploration and research, full size rockets are often encumbering large and expensive. One workaround is the miniature supersonic flow device. It is a means of replicating and measuring the thrust of a rocket nozzle at a fraction of the size and cost, while retaining the ability to visualize converging supersonic flow.
Our team’s design includes a desktop mounted rocket nozzle array tested within a supersonic wind tunnel. The wind tunnel is created using a high-pressure air tank attached to a converging-diverging outlet. Thrust from the nozzle is produced by attaching a high-pressure input to the array. Measurements taken include wind tunnel velocity, internal pressure of the array, and force produced by the nozzle array.
The goal of the Miniature Supersonic Flow Device is to be able to visualize the shock-wave produced between the exhaust from the nozzle array and the supersonic free stream from the wind tunnel. The results will be verified by comparing physical measurements to computer simulations under similar conditions. (Miniature Supersonic Flow Device Poster)
Team: Trey Gunnell (advisor), Madelyn Machon, Andrew Mueller
Advisors: Assoc. Prof. Kuan Chen, Donovan Chipman
 The aim of the Move Like a Microbe team is to design and manufacture a user input device to aid in educating high school students about the motion of microscale organisms moving in very low Reynolds number fluids. Microscale forces and patterns of motion required to swim are not intuitive nor similar to that which humans usually experience, e.g. while swimming. This device assists that comprehension by emulating what it would be like to swim the way a microbe does. It does this by mechanically simulating resistance to motion due to viscous fluid friction as well as resistance due to body deformation of the cilia. The user input is expected to be used to control an interactive video game so as to positively engage students and educate them of concepts learned in various STEM fields. (Move Like a Microbe Poster)
The aim of the Move Like a Microbe team is to design and manufacture a user input device to aid in educating high school students about the motion of microscale organisms moving in very low Reynolds number fluids. Microscale forces and patterns of motion required to swim are not intuitive nor similar to that which humans usually experience, e.g. while swimming. This device assists that comprehension by emulating what it would be like to swim the way a microbe does. It does this by mechanically simulating resistance to motion due to viscous fluid friction as well as resistance due to body deformation of the cilia. The user input is expected to be used to control an interactive video game so as to positively engage students and educate them of concepts learned in various STEM fields. (Move Like a Microbe Poster)
Team: Chase Njord, Brendan Ralston (lead), Ben Stewart, Stephen Unsworth
Advisor: Assoc. Prof. Henry Fu
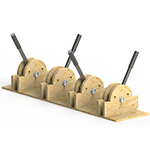
 The randomized two axis clay target thrower launches clay targets into the air to be shot by target sportsman. With our design there are two axes that will randomize in which direction the clay target is launched. The horizontal axis will range from -45° to +45° from center; the vertical axis will range from 10° to 50° above the horizontal axis. A microcontroller will randomize the throwing direction via two brushless DC motors.
The randomized two axis clay target thrower launches clay targets into the air to be shot by target sportsman. With our design there are two axes that will randomize in which direction the clay target is launched. The horizontal axis will range from -45° to +45° from center; the vertical axis will range from 10° to 50° above the horizontal axis. A microcontroller will randomize the throwing direction via two brushless DC motors.
This clay target thrower combines the randomized feature with an automated launching mechanism. Current markets have automated and semi-randomized clay target throwers, but they are sold at very high prices making them out of reach to the average sportsman. This model will be an economical option and thereby more available to the average sportsman. (Randomized Clay Target Thrower Poster)
Team: Ben Anderson, Kitita Clegg, Josh Draper, John Paulsen (lead)
Advisor: Assist. Prof. Steven Naleway
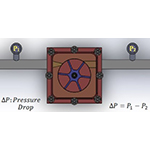 In most homes a Pressure regulator reduces the pressure inside of a home by closing a valve when the water pressure reaches a maximum allowable indoor pressure. This is usually well below the water pressure of the city water lines. We propose to develop a hydroelectric generator to be connected to a residential water line that will use this pressure difference in front of the pressure regulator. The trickle charger can produce more than 0.066 W*hr/L to be used with potable water lines, and connected within utility closets. This is enough to store about 1 kW within the course of a month. That translates into enough energy to power a refrigerator for a day, or light an average house for two days. The target customer for this project would be a savvy home owner who would like to take advantage of energy that is being dissipated. (Steady Flow Vane Turbine Poster)
In most homes a Pressure regulator reduces the pressure inside of a home by closing a valve when the water pressure reaches a maximum allowable indoor pressure. This is usually well below the water pressure of the city water lines. We propose to develop a hydroelectric generator to be connected to a residential water line that will use this pressure difference in front of the pressure regulator. The trickle charger can produce more than 0.066 W*hr/L to be used with potable water lines, and connected within utility closets. This is enough to store about 1 kW within the course of a month. That translates into enough energy to power a refrigerator for a day, or light an average house for two days. The target customer for this project would be a savvy home owner who would like to take advantage of energy that is being dissipated. (Steady Flow Vane Turbine Poster)
Team: Roland Brown, Nicholas Johnson, Chance Jones (lead), Justin Robinson
Advisor: Assist. Prof. Marc Calaf
 The Utah Head Injury Biomechanics Lab is collaborating with EyeGate Pharmaceuticals, Inc., to increase design development efficiency of their hyaluronic-acid based polymer ophthalmic films. These films deliver continuous, localized drug to the ocular surface. Currently, film designs are evaluated in animal models to evaluate long-term retention in the eye. These studies require substantial time and cost to implement, making the iterative design process lengthy and inefficient. To improve design proficiency, EyeGate Pharmaceuticals would like to develop a physical testing system to replicate the ocular environment and interactions of the film with the eye. This system will provide rapid evaluation of designs prior to in vivo testing.
The Utah Head Injury Biomechanics Lab is collaborating with EyeGate Pharmaceuticals, Inc., to increase design development efficiency of their hyaluronic-acid based polymer ophthalmic films. These films deliver continuous, localized drug to the ocular surface. Currently, film designs are evaluated in animal models to evaluate long-term retention in the eye. These studies require substantial time and cost to implement, making the iterative design process lengthy and inefficient. To improve design proficiency, EyeGate Pharmaceuticals would like to develop a physical testing system to replicate the ocular environment and interactions of the film with the eye. This system will provide rapid evaluation of designs prior to in vivo testing.
The testbed will incorporate physiologically accurate eyelid and eyeball motion, an artificial lacrimal system to hydrate the eye, and synthetic materials selected to mimic the mechanical response of the eyelid and eye relative to the CMHA-S hydrogel films. The testing system will be capable of vertical and horizontal eye motion with several preprogrammed film retention tests integrated into the system controls. Variable flow rates controlled by an external syringe pump mimic the natural tear flow of the lacrimal system. The system will also feature a simple and easy to use display and operation panel. (Synthetic Ocular Hydration and Simulation System Poster)
Team: Caleb Kaufman, Joshua Johnson, Kendall McMillan (lead), Chandler Stamm
Advisor: Assoc. Prof. Brittany Coats
 Retinal eye surgery occurs on a very small scale. Doctors have difficulty in both controlling surgical instruments on the near-cellular level, as well as precise delivery of medication to the first and second layer of cells on the retina. Dr. Jake Abbott’s lab is developing a surgical robot capable of movements as fine as 1 micrometer. This robot will operate on the eye, controlled remotely by a doctor.
Retinal eye surgery occurs on a very small scale. Doctors have difficulty in both controlling surgical instruments on the near-cellular level, as well as precise delivery of medication to the first and second layer of cells on the retina. Dr. Jake Abbott’s lab is developing a surgical robot capable of movements as fine as 1 micrometer. This robot will operate on the eye, controlled remotely by a doctor.
Doctors currently use Alcon Vitreoretinal tools for retinal surgery. The team’s goal is to design and manufacture the control stylus which the doctor will control the surgical robot. The control stylus should withstand over 50,000 cycles without failure, be very similar to Alcon tools in ergonomics and operation, and give the operator fine control of the robotic forceps. (Telerobotic Eye Surgery Poster)
Team: Jon Derrick, Tim Kowalchik, Zachary Reed (lead), Juan Tovar
Advisor: Assoc. Prof. Jake Abbott
 Based on several research papers, it has been shown that the output power of an internal combustion engine can be increased by injecting small amounts of water into the engine’s combustion chamber. Tests within the research conclude that water to fuel ratios (volume of water/volume of fuel) of 10 – 20 percent provide the largest increase in power. Research tests also showed a decrease in NOx gas emissions emitted from the combustion while water injection was in use.
Based on several research papers, it has been shown that the output power of an internal combustion engine can be increased by injecting small amounts of water into the engine’s combustion chamber. Tests within the research conclude that water to fuel ratios (volume of water/volume of fuel) of 10 – 20 percent provide the largest increase in power. Research tests also showed a decrease in NOx gas emissions emitted from the combustion while water injection was in use.
Responding to these findings, we are building a universal system that will attach to a majority of vehicles to provide an increase in vehicle power and efficiency. Additionally, this system has the benefit of a decrease in harmful emissions. (Universal Water Injection System for Internal Combustion Engines Poster)
Team: Jacob Crossley, Jason Jones, Christopher Reynolds, Jake Tyler (lead)
Advisor: Prof. Tim Ameel
 The team’s wave energy machine, invented by, and developed under the direction of Dr. Meredith Metzger, is expected to be an effective means of collecting wave energy beneath the ocean surface. The aesthetic benefit of this design will be a great improvement over existing, alternative designs. Also, the machine is expected to be efficient and reliable.
The team’s wave energy machine, invented by, and developed under the direction of Dr. Meredith Metzger, is expected to be an effective means of collecting wave energy beneath the ocean surface. The aesthetic benefit of this design will be a great improvement over existing, alternative designs. Also, the machine is expected to be efficient and reliable.
Performance testing of the current prototype and the mathematical model behind the design will be at the Layton wave pool. These results will be reported at design day, along with articulate descriptions of this model and prototype. (Wave Energy Machine Poster)
Team: Andrew Avati, Kiev Faber, John Goates (lead), Roman Salehi
Advisor: Assoc. Prof. Meredith Metzger



FRESHMAN AND JUNIOR COMPETITIONS
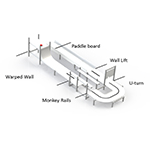 Robot Ninja Warrior:
Robot Ninja Warrior:
ME EN 3210 Mechatronics COMPETITION
Saltair room
(1:00-3:30 p.m.)
The Fall 2017 Mechatronics Competition will be an obstacle course in the spirit of the popular American Ninja Warrior television program. The goal is to successfully and quickly traverse a series of challenging obstacles. A team of students will design and program a robot that utilizes various mechanisms, sensors and actuators to complete each obstacle autonomously. Robots must 1. traverse the Paddle Board, which will tip over if the robot does not stay centered, 2. lift and pass underneath the Wall Lift (a magnetic sensor can be used to locate the handle), 3. use line following sensors to navigate the U-turn, 4. use the Monkey Rails to cross over a pit, and 5. hit the button at the top of the Warped Wall. Teams will score points for successfully completing each obstacle and time of completion will be used as a tiebreaker.
 Super Mario Odyssey
Super Mario Odyssey
ME EN 1010 freshman COMPETITION
West Ballroom
(12:00-3:00 p.m.)
Mario needs help! Bowser has kidnapped Princess Peach to take her in marriage. Mario’s new sentient hat, Cappy, allows him to “capture” and control his enemies. Even with this amazing new ability, he is outnumbered and his throwing arm has grown tired! His only hope is to have an ME EN 1010 team use their launcher to shoot six of Cappy’s friends onto Mario’s enemies as fast as possible, allowing Mario to capture them and save Princess Peach.
 “GLOBAL SOLUTIONS” Water Pump Design:
“GLOBAL SOLUTIONS” Water Pump Design:
ME EN 1000 DESIGN COMPETITION
East Ballroom
(12:00-3:30 PM)
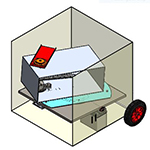
According to the World Health Organization, 1 in 10 people worldwide lack access to safe water. Providing improved drinking water sources for at-risk populations has been named by the United Nations as one of the top priorities of the new millennium. The preferred solution, especially in rural areas, has been to establish infrastructure for pumping water from protected wells. This has allowed people to abandon the practice of using polluted surface water, such as from lakes, rivers, ponds, and open irrigation canals, for drinking, thereby greatly improving health in the local area.
Students in ME EN 1000 were tasked with the design challenge of creating an inexpensive water pump as an “off-the-grid” solution to this problem. In the real-world application, water pumps are expected to use human-power from a bicycle. During the design competition, however, to ensure consistency and fairness, a small DC motor is used to power the pumps. Each team is provided with a MakeBlock starter kit and a budget for parts from a local hardware store. Teams design and build their systems using SolidWorks and hand tools, along with 3-D printers to fabricate custom parts. Teams are required to integrate practical course concepts into their designs. Teams are scored based on the mechanical efficiency of their pump and output produced, measured in terms of the volume of water pumped in two minutes. Winning teams will most definitely be the ones demonstrating the strong engineering skills.