Design Day - Spring 2021
Design Day is an opportunity to share our Senior Design Showcase with the public. Seniors work in groups with faculty to design and test projects.
Additionally, freshman and junior mechatronics’ students compete and showcase their skills.
Visit our Virtual Design Day page for recordings of each groups presentation!
Senior Design Projects
 Currently when taking water, soil, and air samples, someone must physically go to a location to take a sample. Depending on the project, samples need to be taken multiple times a day or at a certain frequency. Our solution to this problem is to create a mechanism/mechanisms attachable to a drone body which can gather soil, air, and water samples without contamination. This would eliminate much of the travel and time required to take samples in cases such as sampling water from a high mountain lake. It could also enable sampling in cases where it is unsafe for a human to do so, such as in chemical accidents or military applications.
Currently when taking water, soil, and air samples, someone must physically go to a location to take a sample. Depending on the project, samples need to be taken multiple times a day or at a certain frequency. Our solution to this problem is to create a mechanism/mechanisms attachable to a drone body which can gather soil, air, and water samples without contamination. This would eliminate much of the travel and time required to take samples in cases such as sampling water from a high mountain lake. It could also enable sampling in cases where it is unsafe for a human to do so, such as in chemical accidents or military applications.
Team: Issak Allaire-MacDonald, Ryan Dalby, Rudy Peterson Gapinski, Chantel Lapins (lead), Blake Rolfing, Colby Smith
Faculty Advisor: Dr. Kam Leang
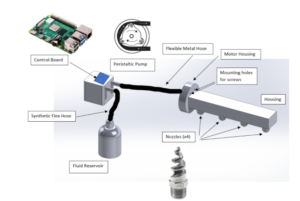 While smoking or cooking meats, they can become dry over the usually long cook times. The autonomous smoke mister automatically bastes meat during cooking, which frees the user from needing to manually baste the meat over the generally long cook times. Current smoker/cooker designs do not incorporate such functionality, but allow for the means to install an external autonomous basting unit.
While smoking or cooking meats, they can become dry over the usually long cook times. The autonomous smoke mister automatically bastes meat during cooking, which frees the user from needing to manually baste the meat over the generally long cook times. Current smoker/cooker designs do not incorporate such functionality, but allow for the means to install an external autonomous basting unit.
Team: Olly Bradstreet, Dom Koenig, Isaac Hansen, Joshua Jones, Sam LeCain, Connor Weston (lead)
Faculty Advisor: Dr. Wenda Tan
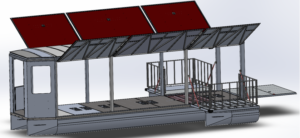
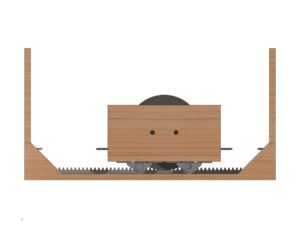
 We are developing a physical simulator for avalanches to be used by the Utah Avalanche Center. This simulator is a semi-automated board that demonstrates how avalanches work using variables such as slope angle, snowpack, anchors, and triggers. The board will be used by educators from the Utah Avalanche Center as they travel to public schools and other locations to spread avalanche awareness. Key points to the board are its ability to raise itself to slope angles between 0-45 degrees, trigger an avalanche made of two types of snowpack layers (represented by sand and chalk), and the ability to separate the two snow materials for re-use.
We are developing a physical simulator for avalanches to be used by the Utah Avalanche Center. This simulator is a semi-automated board that demonstrates how avalanches work using variables such as slope angle, snowpack, anchors, and triggers. The board will be used by educators from the Utah Avalanche Center as they travel to public schools and other locations to spread avalanche awareness. Key points to the board are its ability to raise itself to slope angles between 0-45 degrees, trigger an avalanche made of two types of snowpack layers (represented by sand and chalk), and the ability to separate the two snow materials for re-use.
Team Lead: James Gessel (Team Lead), Carter Greene, Isaac Hale, Davis Harris, Alex McDonald, Westin Stieglitz, Alex Yates
Faculty Advisor: Dr. Wenda Tan
 This project is to develop a sensor to measure pneumatically conveyed coal. At a minimum, the sensor needs to measure relative mass flow of coal between individual pipelines, without degrading. Ideally, the sensor will also measure velocity of the coal flow. The milled coal is extremely abrasive, so the sensor must be either very durable or entirely noninvasive.
This project is to develop a sensor to measure pneumatically conveyed coal. At a minimum, the sensor needs to measure relative mass flow of coal between individual pipelines, without degrading. Ideally, the sensor will also measure velocity of the coal flow. The milled coal is extremely abrasive, so the sensor must be either very durable or entirely noninvasive.
The sensor is for Huntington power plant and will be used by technicians and engineers. The sensor must be installable as a sensor or spool piece, accessible from operational walkways at the powerplant.
Team: Ben Alexander, Anran Chen (lead), John Fisher, Johnny Kimmel, Nick Mecham, Nate Voth
Faculty Advisor: Dr. Shad Roundy
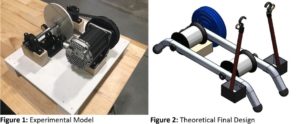
 The project is a bike powered by hydraulic system. In this project we have three main objectives: sprint race, efficiency challenge, endurance challenge. So, in order we meet these objectives, we had to discuss several options for mean functions. Then we finally decided on a classic bike that is a single-rider which is easy to find in the local market, with two wheels for less friction and weight. This bike can carry hydraulic components behind rider, so it does not impede riders’ leg while biking. Pedal will be used for pumping the fluid in hydraulic system. I wanted here to point that we started this project from scratch, meaning, no bike was used from previous projects or groups, so we bought a brand new bike that within our budget, and based on the specification we are looking for, it was manually assembled.
The project is a bike powered by hydraulic system. In this project we have three main objectives: sprint race, efficiency challenge, endurance challenge. So, in order we meet these objectives, we had to discuss several options for mean functions. Then we finally decided on a classic bike that is a single-rider which is easy to find in the local market, with two wheels for less friction and weight. This bike can carry hydraulic components behind rider, so it does not impede riders’ leg while biking. Pedal will be used for pumping the fluid in hydraulic system. I wanted here to point that we started this project from scratch, meaning, no bike was used from previous projects or groups, so we bought a brand new bike that within our budget, and based on the specification we are looking for, it was manually assembled.
Team: Anas Abdulrahman, Ahmed Almusawi, Mitch Dial, Jake Haeley, Mitch Nelson (lead), Josh Workman
Faculty Advisor: Dr. Marc Calaf
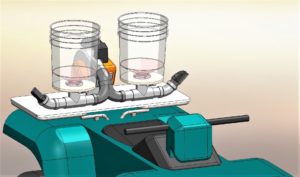
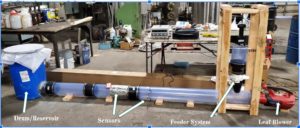
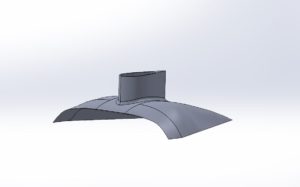
The Salt Lake City Mosquito Abatement District (SLCMAD) needs an improved ATV mounted granular pesticide spreader. The current spreader system is not designed for pesticide dispersal, is too heavy for the ATV and breaks down regularly. The new design disperses pesticide further than the current 9 foot swath, is lightweight, reliable, and user friendly.
Testing demonstrated better performance using air to propel the granules instead of the current spinning disk design. This is accomplished by a commercial leaf blower blowing air into a custom designed duct, while dual hoppers drop pesticide into the air stream. The solid ducting directs the air and pesticide toward the nozzles, which disperses the pesticide 40 feet and with consistent 180 degree coverage behind the ATV.
Team: David Herrera Azcarate (lead), Sally Christensen, Carson Cooper, Cameron Duenas, Graeme Gardner, Michael Graham, Brett Moore, Adam Poulsen,
Faculty Advisor: Dr. Meredith Metzger
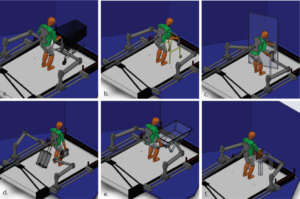 This project supports an ongoing research project emphasizing the use of large robotic arms to allow users to physically interact with virtual objects (e.g. haptic interaction – the sense of touch) in a CAVE based virtual world. The robot arms will feature interfaces mimicking the real-world objects at the end of each robots (e.g. an end-effector), which the users will hold onto when manipulating the virtual object. The team was tasked to instrument existing real-world objects to measure interaction forces and use those interfaces to design end-effectors for the robots. For Fall Semester, the group was tasked to instrument a shopping cart, a wheelbarrow, a walker, and a cane to find appropriate handle parameters for each and then create respective robot end-effectors. Although varying in shape, end-effectors must be interchangeable and fit into the robot arms’ load cells at their wrists. This was accomplished by designing a custom tool changer which mounts to the load cells, and allows end effectors to quickly be attached or removed from the robot. For Spring Semester, the group was tasked to instrument more complex objects to manipulate (e.g. door, box, briefcase, and suitcase) and design end-effectors to mimic these objects. For example, a box without handles can be carried by pressing its sides or lifting from the bottom at its edges, providing two ways of force transmission which must be considered in the design.
This project supports an ongoing research project emphasizing the use of large robotic arms to allow users to physically interact with virtual objects (e.g. haptic interaction – the sense of touch) in a CAVE based virtual world. The robot arms will feature interfaces mimicking the real-world objects at the end of each robots (e.g. an end-effector), which the users will hold onto when manipulating the virtual object. The team was tasked to instrument existing real-world objects to measure interaction forces and use those interfaces to design end-effectors for the robots. For Fall Semester, the group was tasked to instrument a shopping cart, a wheelbarrow, a walker, and a cane to find appropriate handle parameters for each and then create respective robot end-effectors. Although varying in shape, end-effectors must be interchangeable and fit into the robot arms’ load cells at their wrists. This was accomplished by designing a custom tool changer which mounts to the load cells, and allows end effectors to quickly be attached or removed from the robot. For Spring Semester, the group was tasked to instrument more complex objects to manipulate (e.g. door, box, briefcase, and suitcase) and design end-effectors to mimic these objects. For example, a box without handles can be carried by pressing its sides or lifting from the bottom at its edges, providing two ways of force transmission which must be considered in the design.
Team: Courtney Cookson, Derek Greer, Kevin Hardy, Andrew Jue, Emerson Labon, Timmanee Loveless, Sarah McKee (lead)
Faculty Advisors: Dr. Mark Minor
 We created a self-contained, non-invasive device capable of rapidly lowering the core body temperature of an overheating individual. This device is comprised of two parts, a detachable forearm garment and a backpack containing the fluid control system. This allows for various compatible garments to be developed in the future that can be placed on other parts of the body for cooling. This device is ideal for first responders or athletes, who may be prone to overheating.
We created a self-contained, non-invasive device capable of rapidly lowering the core body temperature of an overheating individual. This device is comprised of two parts, a detachable forearm garment and a backpack containing the fluid control system. This allows for various compatible garments to be developed in the future that can be placed on other parts of the body for cooling. This device is ideal for first responders or athletes, who may be prone to overheating.
Team: Stanley Chen (lead), Julia Dominesey, Jackson Dean, James Ehlers, Lily Kim, Erin Morgan, Sam Steele
Faculty Advisor: Dr. Mathieu Francoeur, Dr. Brian Taylor
 The goal of this project is to design, develop, and test an air foil that will be used to lift a hover bike. The idea is to design the airfoil in any way that works, such as the ground effect, using Bernoulli’s equation, or use a cushion of air to lift this foil off the ground. The end goal is to test a foil in CFD software, and then make a scale model to test in a wind tunnel.
The goal of this project is to design, develop, and test an air foil that will be used to lift a hover bike. The idea is to design the airfoil in any way that works, such as the ground effect, using Bernoulli’s equation, or use a cushion of air to lift this foil off the ground. The end goal is to test a foil in CFD software, and then make a scale model to test in a wind tunnel.
Team: Aaron Bjelka, Aaron Fowlks (lead), Dyland Lund, Randall Petersen, Dawson Wangsgard
Faculty Advisors: Dr. Sanford Meek, Dr. Meredith Metzger
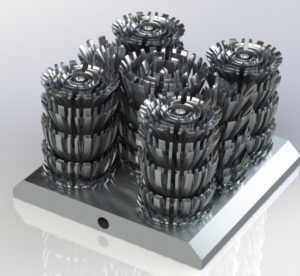 The goal of this project is to design an additively manufactured free convection heatsink for the ITherm 2021 Heat Sink Design Competition that maximizes heat dissipation, minimizes total heatsink volume, and utilizes additive manufacturing to the largest extent possible. The
The goal of this project is to design an additively manufactured free convection heatsink for the ITherm 2021 Heat Sink Design Competition that maximizes heat dissipation, minimizes total heatsink volume, and utilizes additive manufacturing to the largest extent possible. The
motivation for the ITherm Competition is to find creative and novel heat sink designs utilizing additive manufacturing. Our submission to the ITherm Competition will consist of a “White Paper” writeup detailing our heat sink design, proof of concept, and analysis of the heat sink
performance. Given the current age of electrical components, almost everything needs to be cooled in some capacity. Natural convection heatsinks are often cheaper and have a longer service life than forced convection heatsinks. As natural convection heatsinks have worse
performance than forced convection heatsinks, designing natural convection heatsinks to perform as optimally as possible can greatly save costs for cooling numerous types of powered components.
Team: Travis Allen, Michael Alverson, Carter Cocke (lead), Bence Csontos, Hunter Scott, Erik Steenburgh
Faculty Advisors: Dr. Sameer Rao, Dr. Keunhan (Kay) Park
 Current aseismic structures are expensive and failure-prone. Mechanical inerters, small systems that dampen vibrations, provide a novel approach to combating earthquakes; they are simpler to design and manufacture than current aseismic technology, and they can be employed in mass within the foundation of a building. By employing a modular and scalable approach, probability of failure and cost will be mitigated. A combined approach of dynamic analysis, rigid simulation, and physical testing is used to determine the efficacy of mechanical inerters in structural applications. The model chosen is a rack and pinion design which employs a flywheel and springs to create the inertance effect. A shake table was built to test the mechanical interter since Covid-19 regulations limited use of campus resources. This project will continue in future semesters, with future teams building off of this research.
Current aseismic structures are expensive and failure-prone. Mechanical inerters, small systems that dampen vibrations, provide a novel approach to combating earthquakes; they are simpler to design and manufacture than current aseismic technology, and they can be employed in mass within the foundation of a building. By employing a modular and scalable approach, probability of failure and cost will be mitigated. A combined approach of dynamic analysis, rigid simulation, and physical testing is used to determine the efficacy of mechanical inerters in structural applications. The model chosen is a rack and pinion design which employs a flywheel and springs to create the inertance effect. A shake table was built to test the mechanical interter since Covid-19 regulations limited use of campus resources. This project will continue in future semesters, with future teams building off of this research.
Team: Joseph Cochran, William Gilliland, Cooper Hansen, Nathan LeCheminant (lead), Eric Schneggenburger, Scott Stack
Faculty Advisors: Dr. Pai Wang, Dr. Xiaolong Tong, Dr. Roseanne Warren, Dr. Wenda Tan
 Transportation creates a lot of noise and reducing that noise is important in packed urban environments. We will design a cavern or series of caverns that can be built next to some sort of transportation that will reduce that noise without removing the view. The size, shape, and spacing of these caverns will be determined by the frequency of the sound waves as well as testing in Abaqus.
Transportation creates a lot of noise and reducing that noise is important in packed urban environments. We will design a cavern or series of caverns that can be built next to some sort of transportation that will reduce that noise without removing the view. The size, shape, and spacing of these caverns will be determined by the frequency of the sound waves as well as testing in Abaqus.
Team: Phillip Cullinane, Taylor Downs, Jason Grosklags, Zachary Hunzeker, Alex Rinn (lead),
Faculty Advisors: Dr. Pai Wang
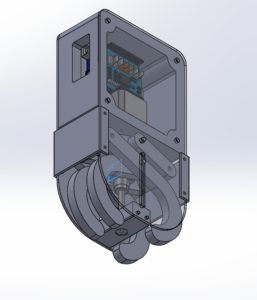
 A major limitation in the use of drones is the battery life. Before a drone can be used for long, it must return to a place to recharge. We designed an inductance coil and perching mechanism that allows a hexacopter to mount a power line and charge its battery which overcomes this shortcoming. Our prototype demonstrates the ability for a drone to dock with a power line and charge itself while being light enough to hold other lightweight modules. The project began with another team last year whose preliminary design focused on the calculations for the appropriate drone base. Our approach improves last years approach by closing the docking mechanism faster, producing more power, and being lighter.
A major limitation in the use of drones is the battery life. Before a drone can be used for long, it must return to a place to recharge. We designed an inductance coil and perching mechanism that allows a hexacopter to mount a power line and charge its battery which overcomes this shortcoming. Our prototype demonstrates the ability for a drone to dock with a power line and charge itself while being light enough to hold other lightweight modules. The project began with another team last year whose preliminary design focused on the calculations for the appropriate drone base. Our approach improves last years approach by closing the docking mechanism faster, producing more power, and being lighter.
Team: Ali Almiskeen, Cody Ashdown, Jesse Crossley, Glen Greager, Tyler Jackson, Adam Lundgren (lead), David Robinson
Faculty Advisors: Dr. Mark Minor, Dr. Roseanne Warren, Dr. Wenda Tan
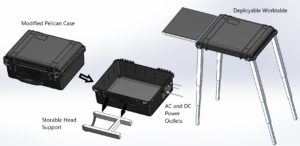 The Moran Eye center sends surgical teams to various remote and developing areas of the world. Each mission generates its own set of challenges, such as damaged equipment, unreliable power sources, and inconsistent pre-screening test results that come from the instability associated with hand-held devices. Our team aims to produce a rugged, highly versatile solution to these particular difficulties. A multi-functional storage case that carries backup battery power, functions as storage for sensitive equipment, and features both an easily deployable worktable and collapsible head support, should allow the Moran Eye Center special outreach team to operate at its maximum potential.
The Moran Eye center sends surgical teams to various remote and developing areas of the world. Each mission generates its own set of challenges, such as damaged equipment, unreliable power sources, and inconsistent pre-screening test results that come from the instability associated with hand-held devices. Our team aims to produce a rugged, highly versatile solution to these particular difficulties. A multi-functional storage case that carries backup battery power, functions as storage for sensitive equipment, and features both an easily deployable worktable and collapsible head support, should allow the Moran Eye Center special outreach team to operate at its maximum potential.
Team: Adam Ervin, Jamie Hughes (lead), Aaron Killpack, Jamie Law, Matt Mattucci, Brock McCloy, Zack Roberts
Faulty Advisor: Dr. Ken D’Entremont
 The objective of the self charging battery is to design and construct a piezoelectric based battery cell that generates a charge when subjected to a change in temperature. Two different styles of battery cell will be designed and constructed, a disk cell and a cuvette cell. Each cell will have current collectors, an airtight seal, and incorporate a heating element that will cause a controlled change in temperature to generate an electrical charge within the piezoelectric material.
The objective of the self charging battery is to design and construct a piezoelectric based battery cell that generates a charge when subjected to a change in temperature. Two different styles of battery cell will be designed and constructed, a disk cell and a cuvette cell. Each cell will have current collectors, an airtight seal, and incorporate a heating element that will cause a controlled change in temperature to generate an electrical charge within the piezoelectric material.
Team: Aaron Atnip, Adam Dallon, Johnathan Johnson, Tanner Nelson, Connor Siri (lead), Jeremiah Young
Advisors: Dr. Roseanne Warren, Dr. Shad Roundy, Jaron Moon
 Current patient lift systems for paraplegic and quadriplegic individuals require significant assistance from others to operate the system and ensure safe transfer. The Self-Clasping Hoist Clamp is part of a group of projects designing an autonomous lift system and harness that allows hands-free transport between locations. Impaired individuals can operate this system safely without outside assistance. The clamp is integrated with the lift system and connects to the clothing harness during operation.
Current patient lift systems for paraplegic and quadriplegic individuals require significant assistance from others to operate the system and ensure safe transfer. The Self-Clasping Hoist Clamp is part of a group of projects designing an autonomous lift system and harness that allows hands-free transport between locations. Impaired individuals can operate this system safely without outside assistance. The clamp is integrated with the lift system and connects to the clothing harness during operation.
Team: Bradley Baer, Christopher Clayton, Landon O’Camb, Wilson Mulder (lead), Cong Nguyen, Kangwoo Yu
Faculty Advisor: Dr. Andrew Merryweather, Dr. Jeffrey Rosenbluth
 There is a rising number of active people in need of oxygen supplementation (COPD, cystic fibrosis, pulmonary hypertension, COVID-19). There is currently a huge unmet need for oxygen supplementation options for active patients, and the options available are outdated with several flaws. Such flaws include the design of the oxygen storage unit (active backpack) and the need to accurately adjust their oxygen. Our project aims to 1) develop an autonomous oxygen control system that adjusts to the patient’s blood oxygen levels, and 2) create an improved oxygen unit housing backpack that is ergonomic, lightweight, and does not cause discomfort or jounce during intense exercise. These objectives will enable said patients to maintain an active lifestyle with fewer limitations and without worries of becoming hypoxic or running out of oxygen.
There is a rising number of active people in need of oxygen supplementation (COPD, cystic fibrosis, pulmonary hypertension, COVID-19). There is currently a huge unmet need for oxygen supplementation options for active patients, and the options available are outdated with several flaws. Such flaws include the design of the oxygen storage unit (active backpack) and the need to accurately adjust their oxygen. Our project aims to 1) develop an autonomous oxygen control system that adjusts to the patient’s blood oxygen levels, and 2) create an improved oxygen unit housing backpack that is ergonomic, lightweight, and does not cause discomfort or jounce during intense exercise. These objectives will enable said patients to maintain an active lifestyle with fewer limitations and without worries of becoming hypoxic or running out of oxygen.
Team: Nils Carlson, Sarah Davis, Maya Ellis, Brett Goilas, Hunter Mansfield (lead), Rafael De Oliveira
Faculty Advisor: Dr. Andrew Merryweather, Dr. Wenda Tan, Dr. Roseanne Warren
 Due to increases in the use of renewable energy, such as solar and wind, traditional power plants are running into new challenges. We are working with PacifiCorp to overcome challenges they are facing with one of their large steam turbines. The power output of renewable energy is dependent on many factors, like wind speed for light intensity. With varying power coming from renewable energy sources, the steam turbine must also vary its power output to meet power demands. This specific turbine was originally built to run at 100% capacity all of the time. However, to fill in the demand not supplied by renewables, the turbine must sometimes operate at loads as low as 20% capacity. This causes undesirable flow conditions within the turbine that induce excessive blade vibrations and unnecessary wear and tear. Our project is focused on creating a sensor array using pitot tubes and thermocouples to monitor the flow conditions at the outlet of the turbine. This device will allow PacifiCorp engineers to monitor the flow conditions within the turbine and determine when undesirable flow arises, which will allow them to quickly change the turbine operation to prevent damage.
Due to increases in the use of renewable energy, such as solar and wind, traditional power plants are running into new challenges. We are working with PacifiCorp to overcome challenges they are facing with one of their large steam turbines. The power output of renewable energy is dependent on many factors, like wind speed for light intensity. With varying power coming from renewable energy sources, the steam turbine must also vary its power output to meet power demands. This specific turbine was originally built to run at 100% capacity all of the time. However, to fill in the demand not supplied by renewables, the turbine must sometimes operate at loads as low as 20% capacity. This causes undesirable flow conditions within the turbine that induce excessive blade vibrations and unnecessary wear and tear. Our project is focused on creating a sensor array using pitot tubes and thermocouples to monitor the flow conditions at the outlet of the turbine. This device will allow PacifiCorp engineers to monitor the flow conditions within the turbine and determine when undesirable flow arises, which will allow them to quickly change the turbine operation to prevent damage.
Team: Nestor Camacho, Todd Fustafson, Devin Laskowski, Anthony Marcello, Randall Rosenlof (lead), Austin Zobell
Faculty Advisor: Dr. Tim Ameel
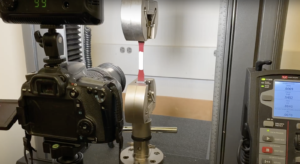 The purpose of this project is to propose a standardized method to find all 21 constants in the general compliance matrix for anisotropic materials in the linear elastic region. Tensile and shear clamps will be designed and manufactured to accommodate testing needs. The accuracy of the designed clamps will be tested, with a goal to keep the standard error below 5%.
The purpose of this project is to propose a standardized method to find all 21 constants in the general compliance matrix for anisotropic materials in the linear elastic region. Tensile and shear clamps will be designed and manufactured to accommodate testing needs. The accuracy of the designed clamps will be tested, with a goal to keep the standard error below 5%.
Team: Alexa Corsey, Ihsan Elnunu, Jonathan Groesz (lead), Ronaldo Herrera, Anthony Nygren, Christopher West
Advisors: Dr. Pai Wang, Xiaolong Tong, Peng Zhang
 Our project goal is to design and build a hand cycle trainer that is accessible for hand cyclists that have reduced mobility and motor control. The project requirements and specifications were determined by some of the TRAILS facility experts and the medical specialists at the U of U Health Craig H. Neilsen Rehabilitation Hospital. This project is being developed due to the limited recreational options for spinal cord injury patients and to create an alternative to exercising outside when weather conditions are unfavorable to the patient’s unique health conditions. To meet the accessibility requirements, the trainer must be ergonomic, easy to set up, and contain “smartâ€, user-friendly features. Due to the limited dexterity of many of the users, alternate methods of securing the hand cycle to the trainer must be used. To meet the “smart†trainer requirements, a dynamic resistance mechanism needs to be implemented to simulate realistic riding conditions. If we can meet these goals with remaining bandwidth, we would like to implement the connectivity between the trainer and third-party training programs, such as Zwift, to simulate conditions on cycling routes.
Our project goal is to design and build a hand cycle trainer that is accessible for hand cyclists that have reduced mobility and motor control. The project requirements and specifications were determined by some of the TRAILS facility experts and the medical specialists at the U of U Health Craig H. Neilsen Rehabilitation Hospital. This project is being developed due to the limited recreational options for spinal cord injury patients and to create an alternative to exercising outside when weather conditions are unfavorable to the patient’s unique health conditions. To meet the accessibility requirements, the trainer must be ergonomic, easy to set up, and contain “smartâ€, user-friendly features. Due to the limited dexterity of many of the users, alternate methods of securing the hand cycle to the trainer must be used. To meet the “smart†trainer requirements, a dynamic resistance mechanism needs to be implemented to simulate realistic riding conditions. If we can meet these goals with remaining bandwidth, we would like to implement the connectivity between the trainer and third-party training programs, such as Zwift, to simulate conditions on cycling routes.
Team: Quinn Alleman, David Brashares, Joseph Davies, Andrew Eyre, Matt Laverty (lead)