Design Day - Spring 2020
Design Day is an opportunity to share our Senior Design Showcase with the public. Seniors work in groups with faculty to design and test projects.
Additionally, freshman and junior mechatronics’ students compete and showcase their skills.
Visit our Virtual Design Day page for recordings of each groups presentation!
Senior Design Projects
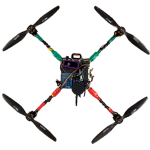
 Light pollution, illuminating of the night sky caused by artificial light, is detrimental to wildlife and has been shown to negatively affect human sleeping patterns. Satellite images hold information on the global impact of light pollution and are well studied; however, understanding the effect of light pollution at a local scale is still primitive. The most advanced method of measuring light pollution at a small scale is done with handheld technology, which limits data collection to reachable areas. Our approach to measuring light pollution was to design a quadcopter to access areas beyond human reach. The quadcopter is equipped with both a sky quality meter to measure skyglow/reflected light and an illuminance sensor to measure direct light sources. Our project is in collaboration with the Dark Skies Initiative. (Autonomous Drone for Urban Light Assessment Poster)
Light pollution, illuminating of the night sky caused by artificial light, is detrimental to wildlife and has been shown to negatively affect human sleeping patterns. Satellite images hold information on the global impact of light pollution and are well studied; however, understanding the effect of light pollution at a local scale is still primitive. The most advanced method of measuring light pollution at a small scale is done with handheld technology, which limits data collection to reachable areas. Our approach to measuring light pollution was to design a quadcopter to access areas beyond human reach. The quadcopter is equipped with both a sky quality meter to measure skyglow/reflected light and an illuminance sensor to measure direct light sources. Our project is in collaboration with the Dark Skies Initiative. (Autonomous Drone for Urban Light Assessment Poster)
Team: Elliot Befus, Alex Bingham, Matthew Goodell, Stephanie Marston (lead), Brett Smiley, Takara Truong
Faculty Advisor: Dr. Kam Leang
 Light pollution, illuminating of the night sky caused by artificial light, is detrimental to wildlife and has been shown to negatively affect human sleeping patterns. Satellite images hold information on the global impact of light pollution and are well studied; however, understanding the effect of light pollution at a local scale is still primitive. The most advanced method of measuring light pollution at a small scale is done with handheld technology, which limits data collection to reachable areas. Our approach to measuring light pollution was to design a quadcopter to access areas beyond human reach. The quadcopter is equipped with both a sky quality meter to measure skyglow/reflected light and an illuminance sensor to measure direct light sources. Our project is in collaboration with the Dark Skies Initiative. (Autonomous Drone for Urban Light Assessment Poster)
Light pollution, illuminating of the night sky caused by artificial light, is detrimental to wildlife and has been shown to negatively affect human sleeping patterns. Satellite images hold information on the global impact of light pollution and are well studied; however, understanding the effect of light pollution at a local scale is still primitive. The most advanced method of measuring light pollution at a small scale is done with handheld technology, which limits data collection to reachable areas. Our approach to measuring light pollution was to design a quadcopter to access areas beyond human reach. The quadcopter is equipped with both a sky quality meter to measure skyglow/reflected light and an illuminance sensor to measure direct light sources. Our project is in collaboration with the Dark Skies Initiative. (Autonomous Drone for Urban Light Assessment Poster)
Team: Elliot Befus, Alex Bingham, Matthew Goodell, Stephanie Marston (lead), Brett Smiley, Takara Truong
Faculty Advisor: Dr. Kam Leang
 For our project we wanted to take the arcade game Skee ball and recreate it so that it folds up into something the size of a suitcase. We didn’t compromise on the nature of the game so our final design is just as fun to play. This leads us to our prototype which is less than 30 pounds and can fit into one back seat of a your car. (Beetle Project Poster)
For our project we wanted to take the arcade game Skee ball and recreate it so that it folds up into something the size of a suitcase. We didn’t compromise on the nature of the game so our final design is just as fun to play. This leads us to our prototype which is less than 30 pounds and can fit into one back seat of a your car. (Beetle Project Poster)
Team: Omar Alkhayat, Curtis Casados, Stephen Liljenquist, Matt Mott, Jordan Munsey (lead)
Faculty Advisor: Dr. Kenneth d’Entremont
 Once the spas are centered and mated, operators attach four aluminum strips diagonally across each side. These strips are mounted to the plastic studs with pointed screws. The purpose of these strips is to keep the spa centered throughout the remainder of production, but they undesirably allow each spa to shift upwards of 1/4 of an inch. Our team will be designing and constructing a prototype bracing system to replace the current system in order to reduce this shifting. (Bullfrog Spas automated Centering System Poster)
Once the spas are centered and mated, operators attach four aluminum strips diagonally across each side. These strips are mounted to the plastic studs with pointed screws. The purpose of these strips is to keep the spa centered throughout the remainder of production, but they undesirably allow each spa to shift upwards of 1/4 of an inch. Our team will be designing and constructing a prototype bracing system to replace the current system in order to reduce this shifting. (Bullfrog Spas automated Centering System Poster)
Team: McKay Avarell, Jon Fabiszak (lead), Kiley Gross, Scott Schaffer
Faculty Advisor: Dr. Mark Fehlberg
 The accumulator container is the device that holds all of the batteries and high voltage circuitry for an electric vehicle. It must provide appropriate cooling to keep the batteries below 60 degrees Celsius during the vehicle’s acceleration and endurance events. The container must be able to withstand 40g of acceleration in the lateral and longitudinal directions in case of a crash and must prevent water and debris from contacting the electronics. (FSAE Accumulator Container Poster)
The accumulator container is the device that holds all of the batteries and high voltage circuitry for an electric vehicle. It must provide appropriate cooling to keep the batteries below 60 degrees Celsius during the vehicle’s acceleration and endurance events. The container must be able to withstand 40g of acceleration in the lateral and longitudinal directions in case of a crash and must prevent water and debris from contacting the electronics. (FSAE Accumulator Container Poster)
Team: Katie Bezdjian, Kobe Carlson, Gabe Cohen, Jeremiah Grell, Kaden Lansford, Noel LeBaron (lead)
Faculty Advisor: Dr. Samuel Drake
 For this project, we designed an entire spring mass dampening system. The springs in this system are a given flexible material that is commonly used in L3Harris projects. We were tasked to give recommendations for future manufacturing of the flexible material to control oscillations of the system by varying dimensions. We created a finite element model of the system to experimentally determine spring constants when the dimensions and Young Modulus were varied. Based on the models, we designed a number of different prototypes to be mounted to a vibrating shaking table. The shaking table allowed us to load a variable vibration profile and see how each of our prototypes responded to the random vibrations. (L3Harris Team Poster)
For this project, we designed an entire spring mass dampening system. The springs in this system are a given flexible material that is commonly used in L3Harris projects. We were tasked to give recommendations for future manufacturing of the flexible material to control oscillations of the system by varying dimensions. We created a finite element model of the system to experimentally determine spring constants when the dimensions and Young Modulus were varied. Based on the models, we designed a number of different prototypes to be mounted to a vibrating shaking table. The shaking table allowed us to load a variable vibration profile and see how each of our prototypes responded to the random vibrations. (L3Harris Team Poster)
Team: Holly Alvarez, Ryan Candlish (lead), Chandler Driggs, Anthony Gygi, Mike Johnson, Zach Smith
Faculty Advisor: Dr. Jacob Hochhalter
 Infusion pumps are medical devices used to deliver fluids into a patient’s body in a controlled manner. Types of pumps include intravenous (IV) and enteral. The retail cost of most infusion pumps is prohibitive for patients in developing countries. This project is specific to development of a low-cost enteral feeding pump for ambulatory patients. The team will need to develop an economic solution to transmit nutritional fluids directly into a patient’s digestive tract. (Low Cost Enteral Infusion Pump (Moog) Poster)
Infusion pumps are medical devices used to deliver fluids into a patient’s body in a controlled manner. Types of pumps include intravenous (IV) and enteral. The retail cost of most infusion pumps is prohibitive for patients in developing countries. This project is specific to development of a low-cost enteral feeding pump for ambulatory patients. The team will need to develop an economic solution to transmit nutritional fluids directly into a patient’s digestive tract. (Low Cost Enteral Infusion Pump (Moog) Poster)
Team: Alex Helphenstine, David Hoshijima, Juan Sanchez, Joseph Siddoway (lead), Tanner Snow
Faculty Advisors: Dr. Jay Kim, Dr. Ryan Stanfield, Dr. Roseanne Warren
 Existing haptic devices use mechanical linkages and motors with encoders to simulate forces and provide tactile feedback. While traditional mechanical haptic devices work well for many applications, the motors and mechanical parts create backlash and inertial effects which limit precision. These effects make traditional haptic devices ineffective for extremely delicate operations such as eye surgery.
Existing haptic devices use mechanical linkages and motors with encoders to simulate forces and provide tactile feedback. While traditional mechanical haptic devices work well for many applications, the motors and mechanical parts create backlash and inertial effects which limit precision. These effects make traditional haptic devices ineffective for extremely delicate operations such as eye surgery.
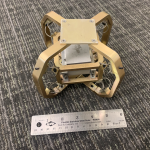
The Utah Telerobotics Laboratory is developing an untethered magnetic haptic device for eye surgery training. The system will use eight electromagnets to simulate forces on a magnet secured to a stylus that is held by the user. Our team has been tasked with designing and constructing the physical structure that supports the electromagnets, a cooling system for the electromagnets, a camera and lighting system to track the stylus in 3D space, and an outer cover for the device. (Magnetic Haptics Poster)
Team: Calvin Barnett, Ethan Evans, Brendan Ezzell, Andreas Hendricks, Spencer Iverson, Andres Rosero (lead), Spencer Schleich, Spencer Stubbs, Jakob Thygerson , and Brandon Whitehead
Faculty Advisors: Dr. Jake Abbott
 The new field of microfluidics lacks public awareness largely due to the lack of outreach. Current microscopes used to examine microfluidic phenomena are expensive, do not natively connect to microfluid examination slides, and are geared towards use by scientists in labs. As such, our goal is to create a low cost and robust microscope designed to observe microfluidic phenomena, the microfluidic chip to go along with it, and a macroscale model to compare it to. All these are to be presented to an audience of middle school age children with the help of the STEM Action Bus. (Microfluidscope Poster)
The new field of microfluidics lacks public awareness largely due to the lack of outreach. Current microscopes used to examine microfluidic phenomena are expensive, do not natively connect to microfluid examination slides, and are geared towards use by scientists in labs. As such, our goal is to create a low cost and robust microscope designed to observe microfluidic phenomena, the microfluidic chip to go along with it, and a macroscale model to compare it to. All these are to be presented to an audience of middle school age children with the help of the STEM Action Bus. (Microfluidscope Poster)
Team: Mohammed Al-ibrahim, Tom Barber, David Bore (lead), Rowdy DeJong, Erik Langlo, Alex Pranger
Faculty Advisors: Dr. Roseanne Warren
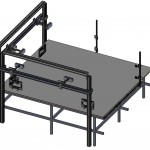
 Our project was to design and build a mosquito spray tunnel for the Salt Lake City Mosquito Abatement District (SLCMAD). Currently, there is difficulty in testing the effectiveness of different pesticides out in the field. Technicians must take a mesh container of mosquitoes and leave it outside in areas they spray, and then collect the sprayed mosquitoes and test mortality rates. This process can take days when testing a variety of different pesticides and the current method is not consistent in the application of pesticide nor is it reliably reproducible. The objective is to create a consistent and reproducible system to allow the technicians to test different pesticides in a controlled environment such as their lab, as well as could be packed away and moved when not in use. (Mosquito Spray Tunnel Poster)
Our project was to design and build a mosquito spray tunnel for the Salt Lake City Mosquito Abatement District (SLCMAD). Currently, there is difficulty in testing the effectiveness of different pesticides out in the field. Technicians must take a mesh container of mosquitoes and leave it outside in areas they spray, and then collect the sprayed mosquitoes and test mortality rates. This process can take days when testing a variety of different pesticides and the current method is not consistent in the application of pesticide nor is it reliably reproducible. The objective is to create a consistent and reproducible system to allow the technicians to test different pesticides in a controlled environment such as their lab, as well as could be packed away and moved when not in use. (Mosquito Spray Tunnel Poster)
Team: Jarem Anderson, Colin Dincher, Brandon Perkins (lead), Ben Shriver
Faculty Advisors: Dr. M Metzger
 Our project is based on building an affordable, lightweight, open-source powered prosthesis. Our price point relies heavily on the utilization of 3D printed technology. Moreover, this project is completely open-source and is intended to provide groundwork for ambitious individuals. The powered prosthesis can be freely manufactured and refined by students, tech hobbyists, and striving engineers to more readily access and improve the field of assistive technology. (Open Leg Bionics Poster)
Our project is based on building an affordable, lightweight, open-source powered prosthesis. Our price point relies heavily on the utilization of 3D printed technology. Moreover, this project is completely open-source and is intended to provide groundwork for ambitious individuals. The powered prosthesis can be freely manufactured and refined by students, tech hobbyists, and striving engineers to more readily access and improve the field of assistive technology. (Open Leg Bionics Poster)
Team: Warren Andelin, Matthew Anderson, Connelly Buchanan, Justin Francis, Andrew Gunnell (lead), Palani Thangaraj
Faculty Advisors: Dr. Tommaso Lenzi, Dr. Jungkyu Kim, Dr. Roseanne Warren
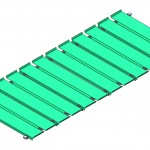 There are innumerable locations that still lack proper wheelchair accessibility. To give wheelchair users more freedom, companies have built and sold various styles of wheelchair ramps. However, while there are many wheelchair ramps currently on the market, they are heavy, difficult to transport, and require multiple individuals to set up. We are aiming to design and build a wheelchair ramp that is easily transported, lightweight, affordable, and can be set up independently by a manual wheelchair user. The ramp will be constructed of components that can be disassembled and stored in a compact fashion. This ramp will be six feet long and be capable of going up 1-2 steps safely. (Portable Storable Wheelchair Ramp Poster)
There are innumerable locations that still lack proper wheelchair accessibility. To give wheelchair users more freedom, companies have built and sold various styles of wheelchair ramps. However, while there are many wheelchair ramps currently on the market, they are heavy, difficult to transport, and require multiple individuals to set up. We are aiming to design and build a wheelchair ramp that is easily transported, lightweight, affordable, and can be set up independently by a manual wheelchair user. The ramp will be constructed of components that can be disassembled and stored in a compact fashion. This ramp will be six feet long and be capable of going up 1-2 steps safely. (Portable Storable Wheelchair Ramp Poster)
Team: Andrew Campbell, Davis England, Tanner Hesterman (lead), Connor Hood, Spencer Kofoed, Nicolas Miller
Faculty Advisors: Dr. Andrew Merryweather
 The TRAILS program builds recreational equipment for use by people with disabilities. Previous senior design teams have built and improved a powered Nordic ski for the TRAILS program. This project builds upon that existing prototype. The previous iteration was a Nordic sit ski with tread-based propulsion, but its only method of input was a remote control. One of the key purposes of TRAILS is to provide a form of exercise to users with disabilities, so the primary goal of this project is to design and implement a method of physical user input for users with paraplegia and tetraplegia.
The TRAILS program builds recreational equipment for use by people with disabilities. Previous senior design teams have built and improved a powered Nordic ski for the TRAILS program. This project builds upon that existing prototype. The previous iteration was a Nordic sit ski with tread-based propulsion, but its only method of input was a remote control. One of the key purposes of TRAILS is to provide a form of exercise to users with disabilities, so the primary goal of this project is to design and implement a method of physical user input for users with paraplegia and tetraplegia.
In addition to the physical input, the scope of this project includes replacing the existing motor. The motor previously used on the powered ski was designed for high-speed, low-torque applications, so it was not well-suited for the job. Finally, the tread had low traction on the snow, as its weight was the only thing holding it down, so gas springs will be used to apply pressure and increase traction. (Powered Nordic Ski Poster)
Team: Spencer Brewster, Eric Devey, Zach Hansen (lead), Graham Noteboom, Mark Santo, Anthony Snow
Faculty Advisor: Dr. Andrew Merryweather
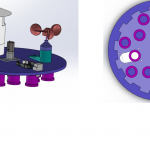 The Salt Lake City Mosquito Abatement District (SLCMAD) requires a mosquito trap that will capture mosquitoes and separate them by time intervals. Additionally, it must track local weather data and control CO2 dispersion. This data will allow SLCMAD to optimally deploy mosquito population reduction methods, decreasing costs. Finally, the trap needs to be easily manufactured as SLCMAD will need 4-5 of them operable on a given day. (Programmable Mosquito Trap Poster)
The Salt Lake City Mosquito Abatement District (SLCMAD) requires a mosquito trap that will capture mosquitoes and separate them by time intervals. Additionally, it must track local weather data and control CO2 dispersion. This data will allow SLCMAD to optimally deploy mosquito population reduction methods, decreasing costs. Finally, the trap needs to be easily manufactured as SLCMAD will need 4-5 of them operable on a given day. (Programmable Mosquito Trap Poster)
Team: Isaiah Beh, Jake Fawson (lead), Josh Graber, Alia Zaki
Faculty Advisors: Dr. M Metzger, Dr. Jay Kim, Dr. Greg White
 Our project is to identify and implement changes to the process of removing anodes in order to reduce worker effort and increase safety. Rio Tinto uses electroplating to transfer copper from an unprocessed anode and deposit it onto a stainless steel cathode. Once the anodes are depleted they must be removed from the cycle. The anodes and cathodes are transferred from the tank solution to an inspection rack. An employee then inspects the anodes to determine which should be removed from the rack. Currently, employees use a “T-shaped” bar to push on the ends of the depleted anodes to remove them off of the rack. The current process puts employees at risk for falls. If the anodes get “stuck” on the rack, the employees must repeatedly hit the bar against the anode to remove it from the rack. This repeated hitting of the bar causes jarring of the employee and increases the risk of injury should the employee slip or the bar slip off the end of the anode. (Rio Tinto Ebay Anode Removal Poster)
Our project is to identify and implement changes to the process of removing anodes in order to reduce worker effort and increase safety. Rio Tinto uses electroplating to transfer copper from an unprocessed anode and deposit it onto a stainless steel cathode. Once the anodes are depleted they must be removed from the cycle. The anodes and cathodes are transferred from the tank solution to an inspection rack. An employee then inspects the anodes to determine which should be removed from the rack. Currently, employees use a “T-shaped” bar to push on the ends of the depleted anodes to remove them off of the rack. The current process puts employees at risk for falls. If the anodes get “stuck” on the rack, the employees must repeatedly hit the bar against the anode to remove it from the rack. This repeated hitting of the bar causes jarring of the employee and increases the risk of injury should the employee slip or the bar slip off the end of the anode. (Rio Tinto Ebay Anode Removal Poster)
Team: Jordan Curry, Kody Dockstader (lead), Jordan Gum, Jaron Moon
Faculty Advisors: Dr. Wenda Tan
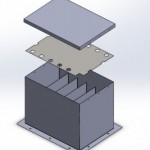
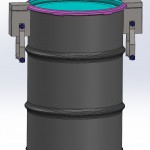 Los Alamos National Laboratory has requested our team to design and construct a prototype of a secure container. This container will be used to transport and store a variety of items. The container must be made from metal, have a cylindrical geometry, 30 gallon internal volume, and be environmentally sealed with a two way pressure relief system. The container must lock automatically when closed and have an indicator displaying when it is in a secure state. The container must be unlocked by the actuation of both a keypad controlled electro-mechanical lock and a purely mechanical lock, which should be integrated into a single locking feature. The electro-mechanical lock must function a minimum of 100 times before the batteries are depleted, and the batteries must have a minimum shelf life of one year. The operational temperature range of the container is from -20°C to 60°C. (Secure Container Poster)
Los Alamos National Laboratory has requested our team to design and construct a prototype of a secure container. This container will be used to transport and store a variety of items. The container must be made from metal, have a cylindrical geometry, 30 gallon internal volume, and be environmentally sealed with a two way pressure relief system. The container must lock automatically when closed and have an indicator displaying when it is in a secure state. The container must be unlocked by the actuation of both a keypad controlled electro-mechanical lock and a purely mechanical lock, which should be integrated into a single locking feature. The electro-mechanical lock must function a minimum of 100 times before the batteries are depleted, and the batteries must have a minimum shelf life of one year. The operational temperature range of the container is from -20°C to 60°C. (Secure Container Poster)
Team: Jacob Cooley, Troy Curtis, Luke Jensen, Damien Pullman, Marc Reininger (lead)
Faculty Advisors: Dr. Steven Naleway
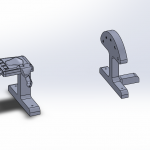
 Parker Hannifin routinely tests solenoids against their Acceptance Testing Procedure (ATP) before commissioning. Our task is to design a manifold assembly which will expedite the testing process and function with their new automated testing procedure. Parker tasked us with 1) designing a universal manifold assembly to accept any of the seven solenoids that they test and 2) to reduce the time required to mount and unmount the solenoids in the test fixture. (Solenoid Test Automation Poster)
Parker Hannifin routinely tests solenoids against their Acceptance Testing Procedure (ATP) before commissioning. Our task is to design a manifold assembly which will expedite the testing process and function with their new automated testing procedure. Parker tasked us with 1) designing a universal manifold assembly to accept any of the seven solenoids that they test and 2) to reduce the time required to mount and unmount the solenoids in the test fixture. (Solenoid Test Automation Poster)
Team: Layne Christensen, Zev Glass, Ryan Godin, Joseph Nuttall (lead)
Faculty Advisors: Dr. Ken Monson
 Super Coiled Polymer (SCP) are a type of inexpensive linear actuator that has similar properties to human muscles. An SCP is formed by wrapping thin copper wire around nylon fishing line and then twisting it to form a tight helical spiral. Heat is generated when an electrical current is sent through the copper wire causing the SCP to contract in length. The SCPs are able to contract up to 20% of their original length which is similar to that of organic human muscles.
Super Coiled Polymer (SCP) are a type of inexpensive linear actuator that has similar properties to human muscles. An SCP is formed by wrapping thin copper wire around nylon fishing line and then twisting it to form a tight helical spiral. Heat is generated when an electrical current is sent through the copper wire causing the SCP to contract in length. The SCPs are able to contract up to 20% of their original length which is similar to that of organic human muscles.
The SCPs are implemented into a soft robotics hand model. The robotic hand will also include a circulatory system that will cool the SCPs. Our main objective is to build off of last year’s model, improving upon problems they faced with water circulation and to implement feedback control to the system. These objectives are important to the project as they have not been explored by others. (Super Coiled Polymer Robotic Hand Poster)
Team: Nate Bennett (lead), Corban Bothell, Matthew Brown, Radit Nopcharoenwong, Zach St. Clair, Justin Szymanski
Faculty Advisors: Dr. Stephen Mascaro
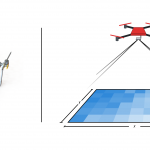 The spatial distribution of temperatures at and near the earth’s surface has a strong influence on exchanges of momentum and energy. Analyses of these exchanges, however, are often limited by the spatial and temporal resolution of the thermal imagery available to researchers. Satellite images are captured infrequently and at a low resolution, while existing solutions to capture localized imagery, such as balloons and commercial UAVs, are prohibitively expensive. The Environmental Fluid Dynamics Lab in the Department of Mechanical Engineering has commissioned a data collection suite, including hardware for mounting sensors and software for aggregating results, to interface with a UAV and provide high-resolution imagery that can be captured frequently. The system allows researchers to select an observation area of interest and plan flights, then access georeferenced images and sensor readings for further study. The platform is designed to integrate with existing hardware and provide a low-cost solution for collecting imagery and data from other environmental sensors. (Thermal Imaging UAV Poster)
The spatial distribution of temperatures at and near the earth’s surface has a strong influence on exchanges of momentum and energy. Analyses of these exchanges, however, are often limited by the spatial and temporal resolution of the thermal imagery available to researchers. Satellite images are captured infrequently and at a low resolution, while existing solutions to capture localized imagery, such as balloons and commercial UAVs, are prohibitively expensive. The Environmental Fluid Dynamics Lab in the Department of Mechanical Engineering has commissioned a data collection suite, including hardware for mounting sensors and software for aggregating results, to interface with a UAV and provide high-resolution imagery that can be captured frequently. The system allows researchers to select an observation area of interest and plan flights, then access georeferenced images and sensor readings for further study. The platform is designed to integrate with existing hardware and provide a low-cost solution for collecting imagery and data from other environmental sensors. (Thermal Imaging UAV Poster)
Team: Ty Craner, Jack Kallas, Robben Migacz (lead), Austin Packard, Michael Quigley
Faculty Advisors: Dr. Eric Pardyjak